Robotics: Aerial Robotics Coursera Answers
Hello Friends in this article i am gone to share Coursera Course: Robotics: Aerial Robotics All Weeks Quiz & Assignment Answers with you..
Enroll: Robotics: Aerial Robotics
Robotics: Aerial Robotics Coursera Answers
ABOUT THIS COURSE
How can we create agile micro aerial vehicles that are able to operate autonomously in cluttered indoor and outdoor environments? You will gain an introduction to the mechanics of flight and the design of quadrotor flying robots and will be able to develop dynamic models, derive controllers, and synthesize planners for operating in three dimensional environments. You will be exposed to the challenges of using noisy sensors for localization and maneuvering in complex, three-dimensional environments. Finally, you will gain insights through seeing real world examples of the possible applications and challenges for the rapidly-growing drone industry.
Mathematical prerequisites: Students taking this course are expected to have some familiarity with linear algebra, single variable calculus, and differential equations.
Programming prerequisites: Some experience programming with MATLAB or Octave is recommended (we will use MATLAB in this course.) MATLAB will require the use of a 64-bit computer.
SKILLS YOU WILL GAIN
- Motion Planning
- Robotics
- Quadcoper
- Matlab
Robotics: Aerial Robotics Coursera Quiz Answers
WEEK 1 QUIZ ANSWERS
1.1 Quiz Answer
Question 1)
Which of these factors has NOT contributed to the rapidly-increasing commercial interest in multi-rotor vehicles?
- Mechanical simplicity
- Inexpensive components
- Ability to hover in mid air
- Efficiency in forward flight
Question 2)
In how many ways can you translate and rotate this robot in free space? Enter your answer as a numeric value (e.g. 1 instead of one).
Answer: 6
Question 3)
How many independent control inputs does the vehicle shown above have?
- 6, because there are six motors
- 6, because a rigid body has six degrees of freedom
- 4, since it is similar to a quadrotor, except with more motors
Question 4)
Based on the lecture content in this course, which of these components are incorporated in commercial products mentioned in lecture such as the DJI Phantom or the Parrot Bebop? (Select all that apply.)
- Mapping
- State estimation
- Autonomous control
- Planning to avoid obstacles
Question 5)
An Inertial Measurement Unit (IMU) is an important sensor used in aerial robotics. A typical IMU will contain an accelerometer and a rate gyro. Which of the following information does a robot get from an IMU? (Select all that apply. Choose only quantities that are directly reported by the IMU. Do not include quantities that can be computed from the IMU measurements but cannot be obtained directly. Additional research to find information about IMUs is allowed and encouraged!) (Select all that apply)
- Position
- Linear velocity
- Angular velocity
- Linear acceleration
- Angular acceleration
- Orientation
Question 6)
What does Simultaneous Localization And Mapping (SLAM) software do? (Select all that applies.)
- Navigates the robot in a cluttered environment
- Controls the robot’s flight through the environment
- Estimates the location of features in the environments
- Causes the robot to avoid obstacles in the environment
- Estimates the position and orientation of the robot with respect to the environment
1.2 Quiz Answer
Question 1)
You observe the response of a system shown in the figure below
What should you do to decrease the oscillations in the response?
- Decrease the proportional gain (Kp)
- Increase the derivative gain (Kv)
- Increase the proportional gain (Kp)
- Increase the integral gain (Ki)
Question 2)
Download the simulation GUI attached below and unzip the contents into a folder of your choice. This is NOT the same GUI that was used in the in-video questions.
Note: If the GUI plots do not show up and you are currently running MATLAB on Chrome, try running the GUI on a different browser (e.g. Firefox, Edge).
Open MATLAB in the directory where the unzipped files are and type “runsim” in the MATLAB Command Window to start the GUI.
Given that the derivative gain K_v=5K
v=5, find the proportional gain K_pK p (up to two decimal places) such that the rise time is less than 1s and overshoot less than 5%.
Answer: 12
Question 3)
Assuming we are using the F550 + E310 + 4 cell battery with a 200g onboard computer and a laser (270g), what is the thrust to weight ratio of the platform? (We use the term “weight” and “thrust” loosely. Except for Thrust/Weight and Propeller, all units are in grams)
-
Answer: 2.264
Question 4)
Why don’t all the rotors of a quadrotor spin in the same direction?
- Spinning all rotors in the same direction uses more battery power.
- Spinning all rotors in the same direction will cause the robot to constantly rotate.
- Spinning all rotors in the same direction does not allow the quadrotor to fly upside down.
Question 5)
Given that a quadrotor consumes 200 W to carry a mass of 1kg, which component contributes more to the quadrotor’s total power consumption?
A 100g computer that consumes 30W for operation or a 200g laser which consumes 20W for operation?
- The laser.
- The computer.
- Both contribute the same to the power consumption.
WEEK 2 QUIZ ANSWERS
2.1 Quiz Answer
Question 1)
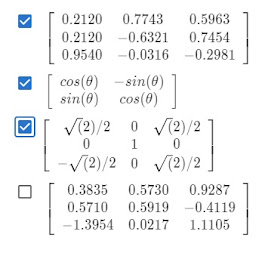
Which of the following matrices are rotation matrices?
Question 2)
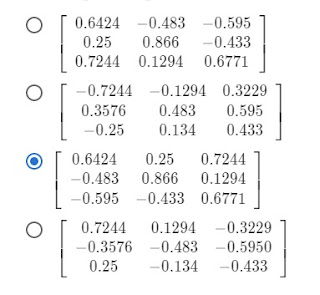
What is the ZYZ euler angle representation, ψ,θ,ϕ , for the following rotation matrix?

- (0.2, 0.1, 0.6)
- (0.7, 0.4, 0.2)
- (0.1, 0.1, 0.2)
- (0.9,0.1,0.1)
Question 3)
At a given time t, the rotation matrix R has the value:
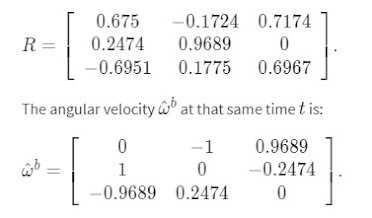
What is ωs ?

Question 4)
Given the following rotation matrix, what is the corresponding axis-angle representation assuming the angle is restricted to [0,π]?

Answer:

Question 5)
Given the following rotation matrix, what is the corresponding axis-angle representation assuming the angle is restricted to [0,π]?
![Given the following rotation matrix, what is the corresponding axis-angle representation assuming the angle is restricted to [0,π]?](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEimRL1F2zAVtNUaTn1IL22VrWzEYfgUB4m0aWqaoUcQTtlgxdXhJehuaVeH7DrDLVIphHv7QaO7d4005aWHSoju_bKGkQCpgkNbodSOW46KD54t1AD7qbHvsMis95nlvjeJczv0zeOviBX765T5XkZLZ_ht_Y_YfK0a1c930rpm5x0KRoJCd2eJ2h0oRw/w244-h96/tyv.jpg)
- Not enough information is given to uniquely determine the axis-angle representation
Question 6)
Recall the transformation from the in-video exercises:
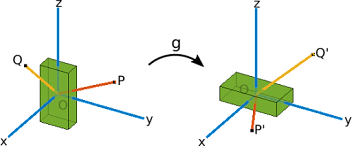
- p x q
- g*(p x q)
- g*(p) x g*(q)
1-D Quadrotor Control
Programming Assignment: 1-D Quadrotor Control Assignment Answer
Google Drive Link——
WEEK 3 QUIZ ANSWERS
2-D Quadrotor Control
Programming Assignment: 2-D Quadrotor Control Assignment Answer
Google Drive Link——
3 Quiz Answer
Question 1)
In the nested feedback control loop
- The inner loop corresponds to orientation and the outer loop corresponds to position.
- The inner loop corresponds to position and the outer loop corresponds to orientation.
Question 2)

- 3
- 5
- 7
- 9
- 11
Question 3
Which of the following are simplifying assumptions we made when designing the controller in this module?
- Roll and pitch angles are close to zero
- Quadrotor is very small
- Angular velocities are close to zero
- Quadrotor is near equilibrium
WEEK 4 QUIZ ANSWERS
4 Quiz Answer
Question 1
What sensors would you rely on for state estimation in an office building with vertical walls without too much clutter due to furniture when the lighting is poor?
- IMU
- GPS
- Cameras
- Laser Scanners
Question 2)
![]()

Question 3)
What is the rotation matrix that describes the attitude error if the current rotation matrix is given by RR and the desired rotation matrix is R_{des}.

Question 4)
What sensors are most likely to fail when operating indoors in a building with glass walls?
- Laser Scanners
- Cameras
- GPS
- IMU
Question 5)
What sensors are most likely to fail when the robot is flying outdoors, close to the ground near the wall of a tall building?
- IMU
- GPS
- Cameras
- Laser Scanners
3-D Quadrotor Control
Programming Assignment: 3-D Quadrotor Control Assignment Answer
Google Drive Link——