Computer Vision with Embedded Machine Learning Coursera Quiz Answers
Hello Friends in this article i am gone to share Coursera Course: Computer Vision with Embedded Machine Learning Coursera Quiz Answers with you..
Computer Vision with Embedded Machine Learning
Edge Impulse
Enroll Link: Computer Vision with Embedded Machine Learning
Computer Vision with Embedded Machine Learning Coursera Quiz Answers
WEEK 1 QUIZ ANSWERS
Computer Vision
Question 1)
Computer vision is the practice and study of using computers to assign high-level meaning or understanding to digital images and/or video.
- True
- False
Question 2)
Unlike other forms of machine learning, computer vision models do not suffer from dataset biases.
- True
- False
Question 3)
Cameras that use embedded machine learning to classify images or detect objects can help reduce network traffic by making decisions without relying on remote servers.
- True
- False
Image Classification with Neural Networks
Question 1)
You want to create a classifier that identifies just resistors among images containing 10 different types of electronic components. What kind of classifier should you use?
- Multiclass
- One vs. one
- One vs. Rest
Question 2)
Raw pixel values can be used as the input to a neural network.
- True
- False
Question 3)
Neural networks learn by adjusting their parameters to maximize a given loss function, which is a measure of how different a prediction (y-hat) is from the ground-truth label (y).
- True
- False
Question 4)
What is the accuracy of class C given the following confusion matrix? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
Answer: —–
Question 5)
You plot the training and validation loss over the training period of the model, and you see the following. What can you conclude about the model?
- The model has overfit to the training data
- The model’s input dimensions do not match the data’s dimensions
- The model has a good fit with the training data
- The model has underfit to the training data
Image Classification on Embedded Devices
Question 1)
Inference is the process of training a machine learning model.
- True
- False
Question 2)
If you manipulate the images (e.g. convert to grayscale, resize, etc.) from the training dataset, you should also perform the same manipulations to the live captured images during inference.
- True
- False
Question 3)
You can only perform inference on images saved as files (e.g. .png).
- True
- False
Module 1 Review
Question 1)
Computer vision is the ability of computers to capture and store digital images.
- True
- False
Question 2)
For machine learning models to be trusted, the following requirements must be met:
The model must be ethical by not promoting any sort of discrimination, biases, or social injustices.
The model must be robust by being accurate and able to resist malicious attacks.
The model must be efficient by taking up as little computer memory as possible.
- True
- False
Question 3)
Using embedded machine learning to solve computer vision problems allows for low-power systems to interpret images and where limited or no networking capabilities are available.
- True
- False
Question 4
You convert a grayscale image (bitdepth of 8 bits) with a resolution of 400×300 pixels into a Numpy array. What is the shape of that array?
- (400, 300, 8)
- (300, 400, 8)
- (400, 300)
- (300, 400)
Question 5
Raw pixel values captured from an image sensor cannot be used as input to a neural network.
- True
- False
Question 6)
Given the following confusion matrix, what is the total accuracy? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
Answer: enter answer here
Question 7)
You plot the training and validation accuracy over the training period of the model, and you see the following. What can you conclude about the model?
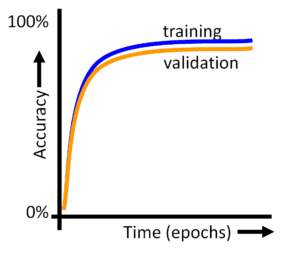
- The model has underfit to the training data
- The model’s input dimensions do not match the data’s dimensions
- The model has overfit to the training data
- The model has a good fit with the training data
Question 8
You want to create an image classifier that identifies among many different breeds of dogs. What kind of classifier should you use?
- Multiclass
- One vs. one
- One vs. rest
Question 9
Inference is the process of using a trained machine learning model to make decisions or classifications with new, unseen data.
- True
- False
Question 10
A training algorithm, such as backpropagation, attempts to minimize a given loss function by adjusting the model’s parameters so that the output of the model (predictions) are close to the ground-truth labels.
- True
- False
WEEK 2 QUIZ ANSWERS
Convolution and Pooling
Question 1)
Let’s say you want to convolve an image (resolution of 6×4) with a 2×2 kernel using valid padding and a stride of 2. What will the resolution (w x h) of the output image be?
- 3×2
- 2×3
- 5×3
- 2×1
Question 2)
Given the following input image and kernel, solve for the value of x in the output image. The kernel is 2×2 with a stride of 1, and we’re using valid padding on the input image. The output image is 3×2, and x is the second pixel to the right on the second row. Your answer should be an integer.
Answer: ——
Question 3)
Given the following input image, a window size of 2×2, a stride of 2, and valid padding, what is the value of x in the output image if we are using maximum pooling? The output image is 2×1, and x is the second pixel to the right on the first row. Your answer should be an integer.
Answer: ——
Convolutional Neural Networks
Question 1)
Kernel values inside a convolution layer are treated as parameters and are updated automatically during the training process.
- True
- False
Question 2)
Arrays are flattened to a 1D vector before being sent to the classifier portion (dense neural network) in a convolutional neural network.
- True
- False
Question 3)
If 4 feature maps are sent to a convolution layer with 3 convolution filters, that layer will output 12 feature maps.
- True
- False
Question 4)
Convolutional neural networks use convolution to automatically pick out the most salient features in an image, such as edges, blobs, and shapes.
- True
- False
Visualizations and Data Augmentation
Question 1)
A class activation map shows which features from the final convolution step were most important in the decision-making process.
- True
- False
Question 2)
Data augmentation can help reduce overfitting.
- True
- False
Transfer Learning
Question 1)
With transfer learning, the process of fine-tuning involves freezing a portion of the model and updating other parameters during training.
- True
- False
Question 2)
You need a larger training dataset with transfer learning than if you trained the model from scratch (assuming you are using the model to achieve the same objective).
- True
- False
Module 2 Review
Question 1)
Let’s say you want to perform a max pooling operation on an image with resolution 10×8 using a 3×3 window, a stride of 3, and valid padding. What will the resolution (w x h) of the output image be?
- 5×4
- 3×2
- 8×6
- 2×3
Question 2)
Given the following input image and kernel, solve for the value of x in the output image. The kernel is 2×2 with a stride of 2, and we’re using valid padding on the input image. The output image is 2×1, and x is the second pixel to the right on the first row. Your answer should be a decimal with 1 decimal place (e.g. 123.4)
Answer: ———-
Question 3)
Given the following input image, a window size of 2×2, a stride of 2, and valid padding, what is the value of x in the output image if we are using average pooling? The output image is 2×1, and x is the first pixel on the first row. Your answer should be a decimal with 1 decimal place (e.g. 123.4).
Answer: ———-
Question 4)
Pooling layers contain parameters that are updated automatically during training.
- True
- False
Question 5)
The feature extraction portion of a convolutional neural network filters and pools input images to create feature maps that identify salient features that are used in the decision-making process.
- True
- False
Question 6)
If 2 feature maps are sent to a convolution layer with 4 convolution filters, how many output feature maps will there be from that layer?
- 2
- 6
- 4
- 8
Question 7)
A class activation map can be used to determine how important an individual pixel in the input image was in the decision-making process.
- True
- False
Question 8)
Data augmentation can fix training issues caused by low-quality images (such as poor lighting, subject out of focus, cropped objects, etc.).
- True
- False
Question 9)
With transfer learning, you start with a new model that has randomized parameters.
- True
- False
Question 10)
Generally, you need to train for more epochs with transfer learning than if you trained the model from scratch (assuming you are using the model to achieve the same objective).
- True
- False
WEEK 3 QUIZ ANSWERS
Object Detection
Question 1)
What is the recall of class A given the following confusion matrix? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
The per-class recall is calculated by the following equation:
Answer:—-
Question 2)
Let’s say that we train a binary classifier to identify “dogs” vs. rest. We create a histogram of the results of the test set in the plot shown below. If we set the initial decision threshold to 0.5, we get the true negatives, false negatives, true positives, and true negatives as shown. What happens to precision as we move the decision threshold up (say, to 0.7)?
Remember that precision is the proportion of positive predictions that was actually correct. Here is the equation for solving for precision:
- Precision will increase
- Precision will decrease
- Precision will invert
- Precision will stay the same
Question 3)
Given the following precision-recall graph (measured from a test set), calculate the average precision (AP). Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
You should use the PASCAL Visual Object Classes Challenge (2009) definition of average precision, which is calculated by the following equation (which states that the average precision is the mean of the precision values as measured from 11 equally spaced recall values from 0.0 to 1.0):
Question 4)
Let’s say your model detects two objects, and the bounding boxes have some overlap as shown in the diagram below. The units of measurement are given in number of pixels. What is the Intersection over Union (IoU) score for these bounding boxes? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683)
The equation for finding IoU is given as follows (where Intersection is the area of overlap of the boxes and Union is the area encompassed by both boxes):Remember that area is found by multiplying width × height.
Answer: ——- Enter answer here
Question 5)
Object detection models attempt to predict the location and label of every object in an image, regardless of whether those objects were in the training data or not.
- True
- False
Image Segmentation
Question 1)
Semantic image segmentation attempts to label every pixel in an image.
- True
- False
Question 2)
Instance segmentation can identify different instances of the same class in an image.
- True
- False
Question 3)
The output of one machine learning model can be used as the input to another machine learning model.
- True
- False
Module 3 Review
Question 1)
What is the precision of class A given the following confusion matrix? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
The per-class precision is calculated by the following equation:
Question 2)
Let’s say that we train a binary classifier to identify “dogs” vs. rest. We create a histogram of the results of the test set in the plot shown below. If we set the initial decision threshold to 0.5, we get the true negatives, false negatives, true positives, and true negatives as shown. What happens to recall as we move the decision threshold down (say, to 0.3)?
Remember that recall is the proportion of actual positives that was identified correctly. Here is the equation for solving for recall:
- Recall will increase
- Recall will decrease
- Recall will stay the same
- Recall will invert
Question 3)
Let’s say your model detects two objects, and the bounding boxes have some overlap as shown in the diagram below. The units of measurement are given as number of pixels. What is the Intersection over Union (IoU) score for these bounding boxes? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
The equation for finding IoU is given as follows:
Answers: ————-
Question 4)
You are creating an object detector that looks for cups, plates, and forks in images. You calculate the average precision (AP) for the following classes based on the test set (assuming the IoU threshold was equal to or over 0.5 in each case):
- Cup: 0.807
- Plate: 0.913
- Fork: 0.752
What is the mean Average Precision (mAP) for this model (assuming we are looking for the mAP score for cases where IoU >= 0.5)? Please express your answer as a decimal rounded to 3 decimal places (For example, 0.6825 would be 0.683).
Enter answer here
Question 5)
Object detection models will only attempt to locate and identify objects in an image that it has been trained to look for.
- True
- False
Question 6)
Semantic segmentation can identify different instances of the same class in an image.
- True
- False
Question 7)
Instance segmentation gives you the location of identified objects in an image.
- True
- False
Question 8)
Object localization and classification must be performed in a single pass through one model.
- True
- False